
Sponsor: Office of Naval Research
Project Lead: Geoff Hollinger (OSU)
Project Partners: Oregon State University, University of Oregon, University of Washington
Project Dates: February 2023-January 2027
Award Number: N00014-23-1-2171
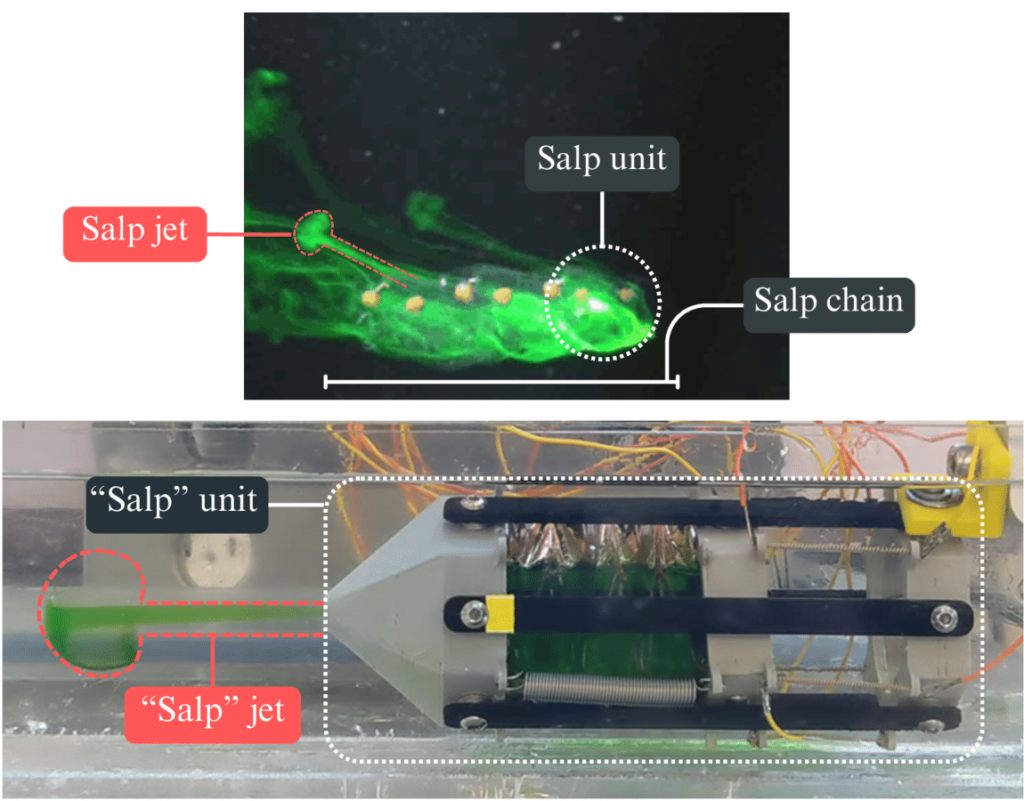
This bio-inspired project focuses on developing locomotion and coordination methods for deploying soft, reconfigurable robots inspired by salps, a type of marine organism. These barrel-shaped, gelatinous animals move by jet propulsion and link up in long chains. The project team envisions a system of multiple heterogeneous soft robots, manufactured using state-of-the-art polymers, which could be deployed for underwater monitoring and inspection tasks. Research areas include robotic locomotion, fabrication and control, and communication within robot teams.
Publications & Presentations
2025
J. Choi, A. Cabrera, and R. L. Hatton, “Geometric Optimal Control of Mechanical Systems with Gravitational and Resistive Force,” submitted to the 2025 IEEE Int’l Conference on Robotics and Automation (ICRA), under review, available at: https://www.arxiv.org/abs/2410.09657
Y. Yang, R. L. Hatton, “Geometric Design and Gait Co-Optimization for Soft Continuum Robots Swimming at Low and High Reynolds Numbers”, submitted to the 2025 IEEE Int’l Conference on Robotics and Automation (ICRA), under review, available at: https://arxiv.org/abs/2409.15220
P. Rustagi and S.Saisubramanian, “Mitigating Side Effects in Multi-Agent Systems Using Blame Assignment”, submitted to submitted to the 2025 IEEE Int’l Conference on Robotics and Automation (ICRA), under review, available at: https://arxiv.org/pdf/2405.04702
2024
J. Choi and R. L. Hatton, “Optimal Control Approach for Gait Transition with Riemannian Splines,” to appear in 63rd IEEE Conference on Decision and Control (CDC), Dec. 2024.
A. Damian-Serrano, K.R. Sutherland, A developmental ontology for the colonial architecture of salps. Biological Bulletin. 2024.
N. L. Hecht, “Development and Gait Optimization of a Scalable Salp-Like Robot with Passive Joints and Active Link Side Thrust Vectors,” MS Thesis (Robotics), Oregon State University, June 2024.
N. L. Hecht, Y. Yang, F. Rozaidi, and R. L. Hatton, “Design of a Planar, Salp-Like Robot,” in 2024 IEEE Int’l Conference on Robotics and Automation (ICRA) Workshop on Unconventional Robots: Universal Lessons for Designing Unique Systems.
A. Jones, “Jet ‘Salps’: The creation and characterization of biomimetic, soft-robotic jet propulsors,” MS Thesis (Robotics), Oregon State University, June 2024.
A. Jones and J.R. Davidson, “Underwater salp-inspired soft structure contraction with twisted coiled actuators,” In Proc. 7th IEEE-RAS Int’l Conf. on Soft Robots (RoboSoft), San Diego, CA, Apr. 2024, pp. 504-510.
K.A. Morgansen, University of Pennsylvania GRASP Lab, “Integrated Sensing and Actuation for Robust Flight Systems,” Invited Seminar. April 2024.
E. Sundquist, C. Whitehair, and K. A. Morgansen, “Nonlinear multi-sensor observability and estimation of rigid body inertial parameters,” in AIAA SciTech Forum, 2024.
K.R. Sutherland, A. Damian-Serrano, K.T. Du Clos, B.J. Gemmell, S.P. Colin, J.H. Costello, “Spinning and corkscrewing of oceanic macroplankton revealed through in situ imaging” Science Advances. 10(20), p.eadm9511. 2024.
2023
A. Damian-Serrano, M. Hughes, K. R. Sutherland, “A New Molecular Phylogeny of Salps (Tunicata: Thalicea: Salpida) and the Evolutionary History of Their Colonial Architecture,” Integrative Organismal Biology, Volume 5, Issue 1, 2023.