
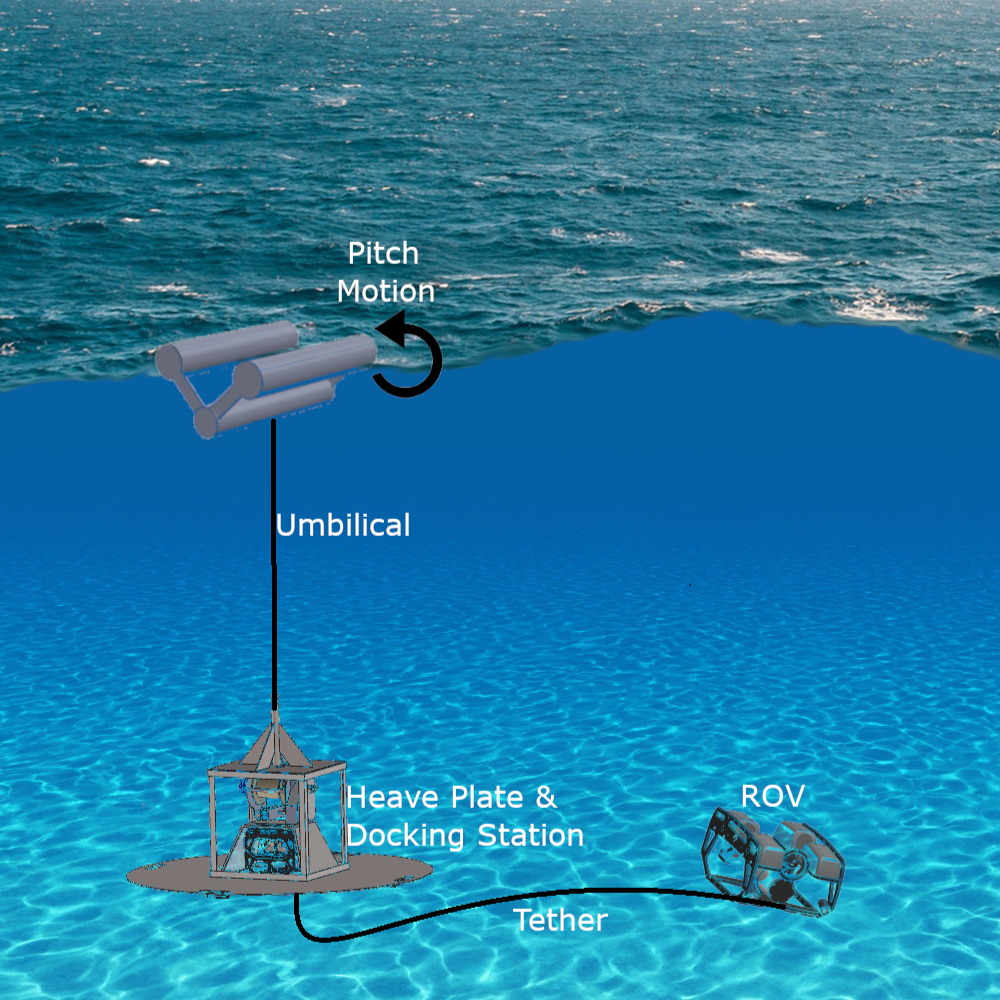
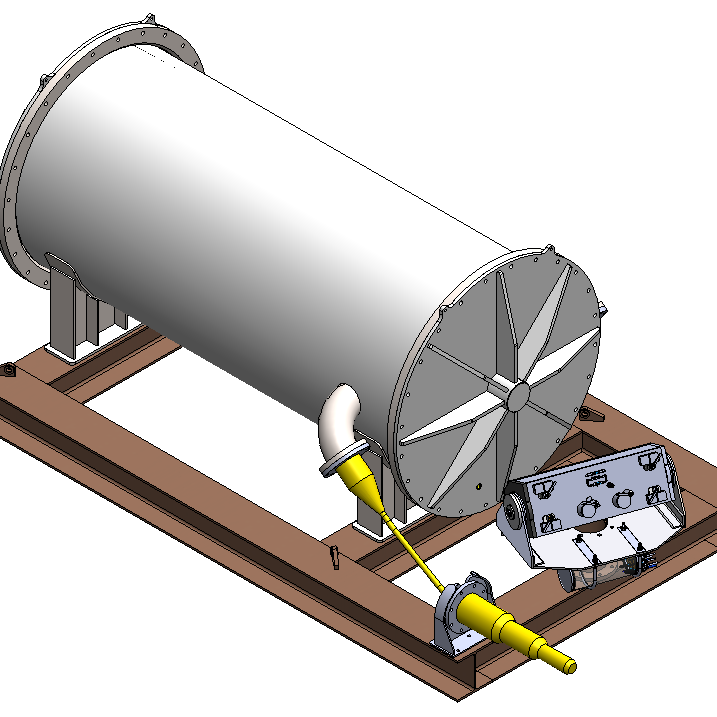
Wave Energy Converter – Unmanned Underwater Vehicle
Autonomous Inspection of Marine Hydrokinetic Energy Converters
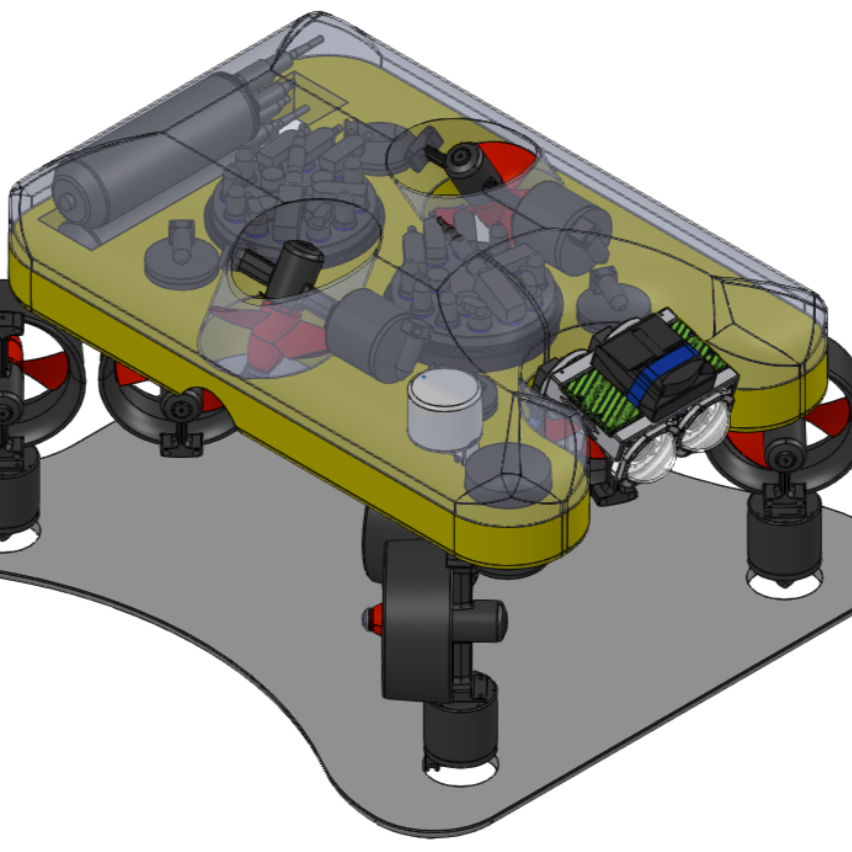
Autonomous Docking and Recharging
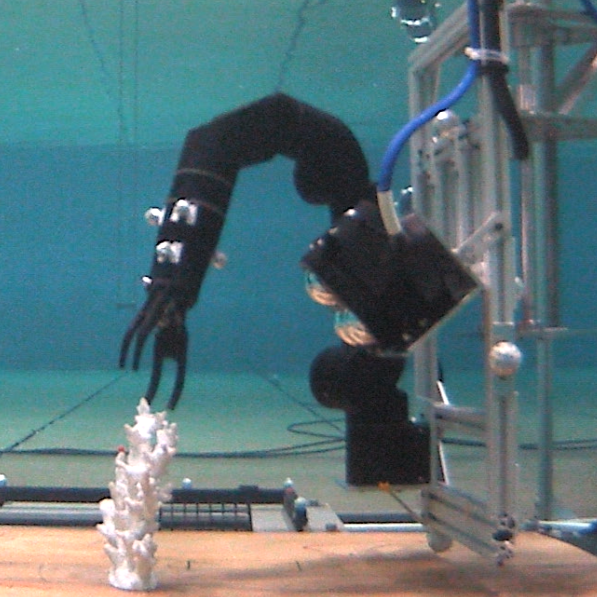
Autonomous Subsea Robotic Manipulation

Manipulation with an ROV-Mounted Robotic Arm
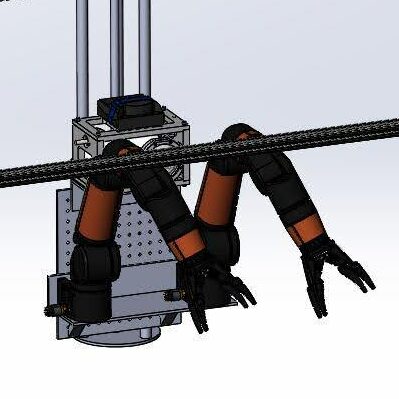
Coordinated
Manipulation
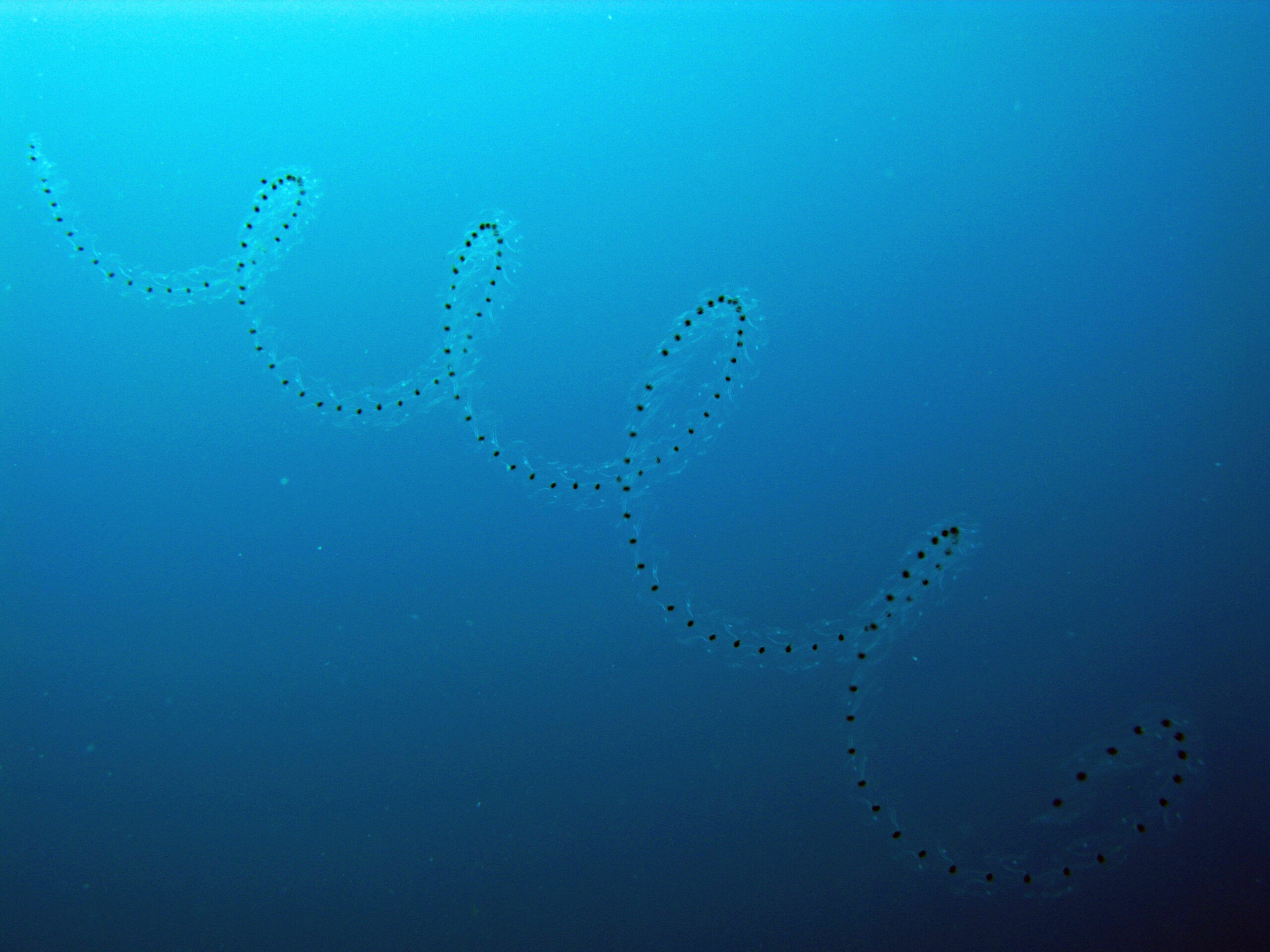
Underwater Locomotion and Distributed Coordination
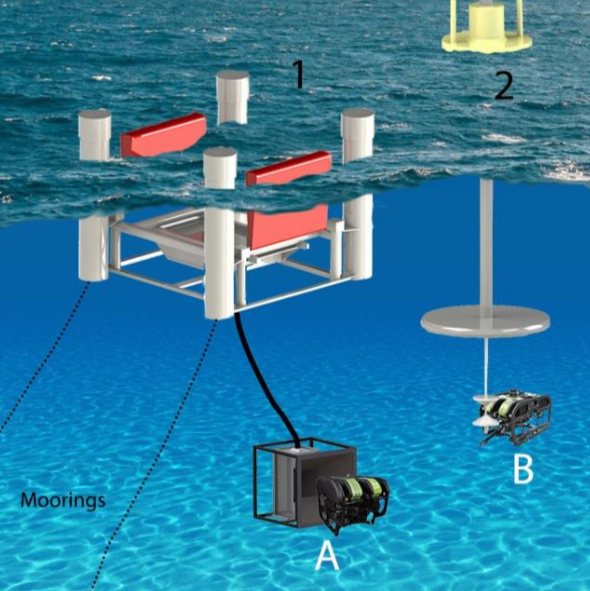
MHK Seafloor Microgrid Demonstration
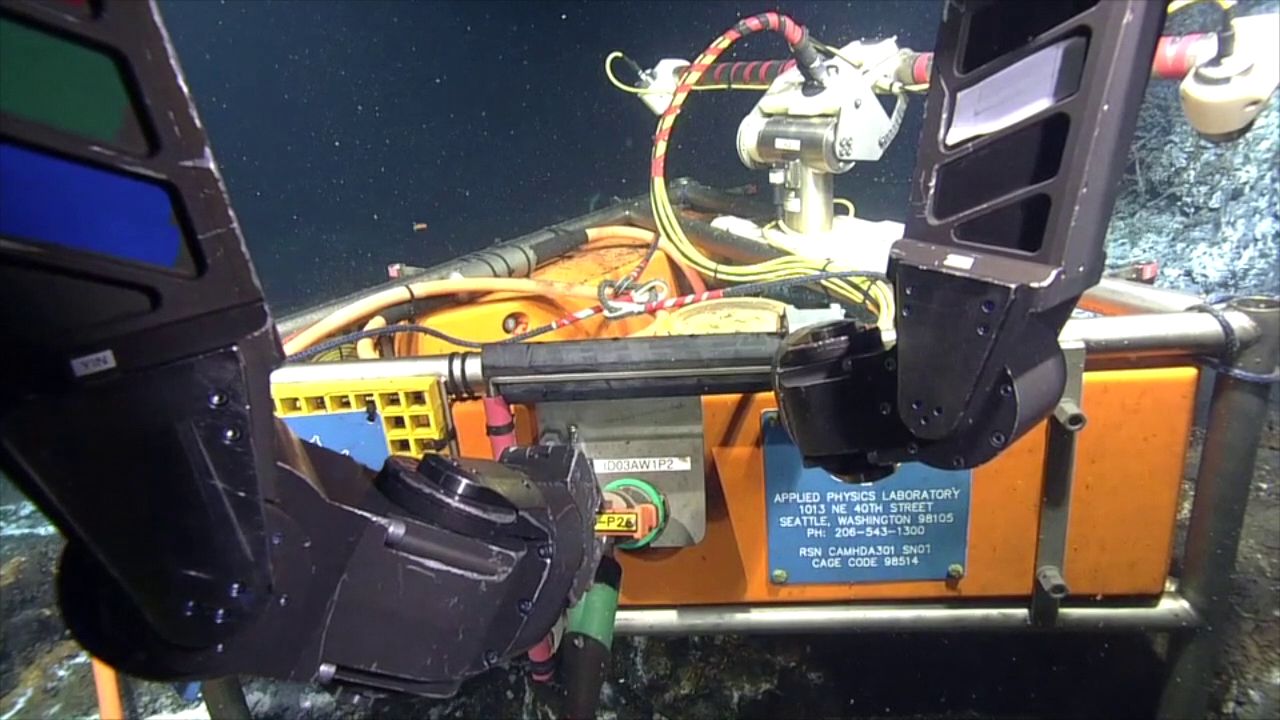
Resident Seabed Autonomy