
Sponsor: Office of Naval Research
ONR Award Number: N00014-21-1-2052
Project Leads: Geoff Hollinger (OSU), Aaron Marburg (UW)
Project Dates: December 2020-December 2025
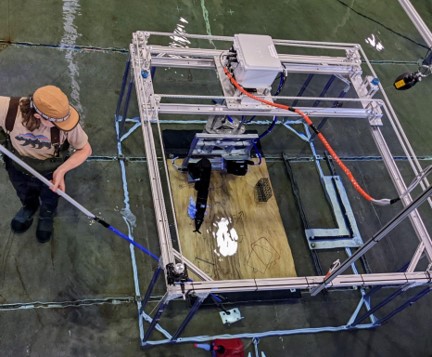
This project is developing new technologies in perception, control/optimization, operator interfaces, and soft materials to enable dextrous, robust, and flexible robotic manipulation in underwater environments. The team envisions a semi-autonomous remotely operated vehicle (ROV) capable of performing complex manipulation tasks (e.g. hull cleaning, pier maintenance, and environmental sampling) in highly energetic conditions. An operator provides high-level commands to the vehicle through an interface that provides advanced decision support, and the commands are interpreted and executed using advanced robotic perception and trajectory optimization/control algorithms. The vehicle uses a soft gripper attached to a high-degree-of-freedom arm with onboard touch sensing to feel its way around the environment and provide a robust grasp. Such a system has the potential to improve the efficiency of subsea manipulation tasks, reduce ROV operator’s training requirements, and enable the completion of tasks in environments where dexterous manipulation is not currently possible. This project is a collaboration between Oregon State University and the University of Washington Applied Physics Laboratory and includes laboratory testing in the O. H. Hinsdale Wave Laboratory at Oregon State University using a robotic arm mounted on a test stand.
Publications & Presentations
2024
R. Challa, H. Brown, C. Jain, Z. Speiser and H. Knight, “Scrape That Barnacle’: Commanding Underwater Robot In-Contact Manipulation Tasks with Intuitive Spatial-Temporal-Force Features,” 2024 IEEE International Conference of Robot and Human Communication (Ro-Man) @Inter-AI workshop.
S. Chow, “Learning-based Techniques for Fast and Robust Motion Planning,” PhD thesis, Oregon State University, Corvallis, OR, March 2024.
J. Cook, “Multiagent Learning of Robust Teaming”, PhD thesis, Oregon State University, Corvallis, OR, June 2024.
I. Good, “Robots with a Twist: Torque Responsive Metamaterials Enable Efficient Energy and Force Transduction,” PhD Thesis, University of Washington, Seattle, WA, July 2024.
I. Good, S. Balaji and J. I. Lipton, “Enhancing the Performance of Pneu-Net Actuators Using a Torsion Resistant Strain Limiting Layer,” 2024 IEEE 7th International Conference on Soft Robotics (RoboSoft), San Diego, CA, USA, 2024, pp. 235-242.
N. Guimond and A. Marburg and H. Chizeck, “FindingPlastic: Underwater Plastic Bag Detection and Retrieval,” MTS/IEEE Oceans 2024 Halifax.
M. Jiang, S Khorram, F.Li. Comparing the Decision-Making Among Transformers and CNNs with Explanation Methods. IEEE/CVF International Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, 2024. Best Student Paper Runner-Up.
S. Khorram, M. Jiang, M. Shahbazi, M.H. Danesh, F. Li. Taming the Tail in Class-Conditional GANs: Knowledge Sharing via Unconditional Training at Lower Resolutions. CVPR, 2024.
A. Marburg, L. Lindzey, M. Micatka, T. Player, and A. Sekar, “An Open-Source Pipeline for Automated Subsea Object Grasping,” MTS/IEEE Oceans 2024 Halifax Online Proceedings.
M. Micatka and A. Marburg, “Clustered Grasp Volumes for Improved Grasp Selection. MTS/IEEE Oceans 2024 Halifax Online Proceedings.
M. Rosette, H. Kolano, C. Holm, G. Hollinger, A. Marburg, M. Pickett, and J.R. Davidson, “WAVE: An open-source underWater arm-vehicle emulator,” In Proc. IEEE Int’l Conf. on Robotics and Automation (ICRA), Yokohama, Japan, May 2024, pp. 1505-1511.
R. Singh and G. Hollinger, “Motion-aware underwater robotic grasping,” in Proc. IEEE OCEANS Conference, Halifax, Canada, September 2024.
D. Smerkous, Q. Bai, Li Fuxin. Minimizing Hyperspherical Energy for Diverse Deep Ensembling. Accepted to NeuRIPS 2024.
A. Ullah, T. Yan and L. Fuxin, “CVAE-SM: A Conditional Variational Autoencoder with Style Modulation for Efficient Uncertainty Quantification,” 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 2024, pp. 10786-10792.
2023
P. Baskaran, PhD Thesis, “Multi-Dimensional Task Recognition for Human-Robot Teaming,” Oregon State University, December 2023.
S. Chow, D. Chang, and G. Hollinger, “Parallelized control-aware motion planning with learned controller proxies,” IEEE Robotics and Automation Letters, vol. 8, no. 4. pp. 2237-2244, April 2023.
M. Jiang, S. Khorram, Li, F. “Diverse Explanations for Object Detectors with Nesterov-Accelerated iGOS++ “,” in Proc. British Machine Vision Conference (BMVC), Aberdeen, UK, 2023.
W. Khademi, F. Li. “Diverse Shape Completion via Style-Modulated Generative Adversarial Networks,” In Proc. Neural Information Processing Systems (NeuRIPS), New Orleans, LA, USA, 2023.
T. Player, D. Chang, F. Li, and G. Hollinger, “Real-time generative grasping with spatio-temporal sparse convolution,” in Proceedings of the IEEE International Conference on Robotics and Automation, London, UK, May 2023.
N. G. Pusalkar, M.-R. Giolando, J. A. Adams, “Autonomous Underwater Robot Grasping Decision Support System,” HRI ’23: Companion of the 2023 ACM/IEEE International Conference on Human-Robot Interaction, pp. 887-888, 2023.
N. G. Pusalkar, M.-R. Giolando, J. A. Adams, “Decision Support System for Autonomous Underwater Robot Grasping,” HRI ’23: Companion of the 2023 ACM/IEEE International Conference on Human-Robot Interaction, pp. 198-202, 2023.
K. Sullivan, “Using an off-the-shelf rigid gripper to grasp objects of different strengths and compliances,” MS Thesis, University of Washington, 2023.
A. Shaevitz, M. L. Johnston and J. R. Davidson, “Design, Characterization, and Modeling of Barometric Tactile Sensors for Underwater Applications,” 2023 IEEE International Conference on Soft Robotics (RoboSoft), Singapore, Singapore, 2023, pp. 1-6.
2022
A. Garg, I. Good, D. Revier, K. Airis and J. Lipton, “Kinematic Modeling of Handed Shearing Auxetics via Piecewise Constant Curvature,” 2022 IEEE 5th International Conference on Soft Robotics (RoboSoft), Edinburgh, United Kingdom, 2022, pp. 423-430.
I. Good, T. Brown-Moore, A. Patil, D. Revier and J. I. Lipton, “Expanding the Design Space for Electrically-Driven Soft Robots Through Handed Shearing Auxetics,” 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 2022, pp. 10951-10957.
K. Puente, S. Walker, J. Davidson, and G. Hollinger, “Design and grasp planning for a reconfigurable variable stiffness underwater robotic hand,” in Proc. IEEE International Conference on Robotics and Automation Workshop on Compliant Manipulation (ICRA), Philadelphia, PA, May 2022.
Y. K. Senewiratne, “Decentralized multi-robot exploration with sparse communication through deep imitation learning,” MS Thesis, Oregon State University, 2022.
J. Yuan, J. Patravali, H. Nguyen, C. Kim, F. Li. “Maximal Cliques on Multi-Frame Proposal Graph for Unsupervised Video Object Segmentation,” European Conference on Computer Vision 2022. arXiv:2301.12352.
2021
D. Chang, S. Chow, T. Player, and G. Hollinger, “Adaptive and informative planning for an underwater vehicle-manipulator system,” in Proc. IEEE International Conference on Robotics and Automation 1st Advanced Marine Robotics Technical Committee Workshop on Active Perception (ICRA), virtual, May, 2021.