
The Buzz: Clamboree, RTK, Mission Planner

Clamboree: Every year, Coos Bay hosts an event to celebrate their fondness for Empire clams (otherwise known as gapers, horse clam, horseneck clam, or Tresus capax) and more recently, glass art. This year was particularly important for ODFW to make their presence known due to upcoming estuarine studies being conducted in the bay. Despite being located by Clamboree staff in the most distant corner from the action (you would think being near the kids section, which also happened to be next to the beer/wine garden, would draw lots of people), we had ample amounts of wanderers playing in our touch tank full of clams, crabs, and other invertebrates. Loaded for bear with pamphlets, sport fishing regulations, identification charts and shadow boxes, crab gauges, visual displays of legal and non-legal crab, and plenty of things to poke and touch, SEACOR did their best to provide educational outreach for the event.
2016 Claboree Poster
Bay Clam Nutrition Facts
RTK: RTK, or real-time kinematic, is a rapid survey style that utilizes several GPS reference stations to calculate highly accurate “rover” or moving GPS positions on-the-fly. This style allows us to record locations with very low error and accuracies down to about 1 centimeter quickly (under 2 minutes per location), easily (push of a button), and without more additional computer processing. The purpose of RTK surveys for SEACOR projects remain primarily in the realm of conducting estuarine bathymetry surveys; combining echosound measurements with precise GPS locations. However, with some additional equipment, RTK provides a massive benefit to our UAV imagery we plan to collect. Precise GPS data makes our imagery able to be used for measuring distance on the ground from aerial photography; a game changer that allows us to measure and count clam shows that are roughly a centimeter in size over a much larger area and long after the tides have returned to obscure them. These clam shows also happen to be the most recreationally harvested bay clams: gapers, cockles, littlenecks, and butters. UAVs plus RTK ground-truthing might allow far more advanced and accurate calculation using much fewer resources than typical quadrat surveys of bay clam populations; a boon to clam resource management.
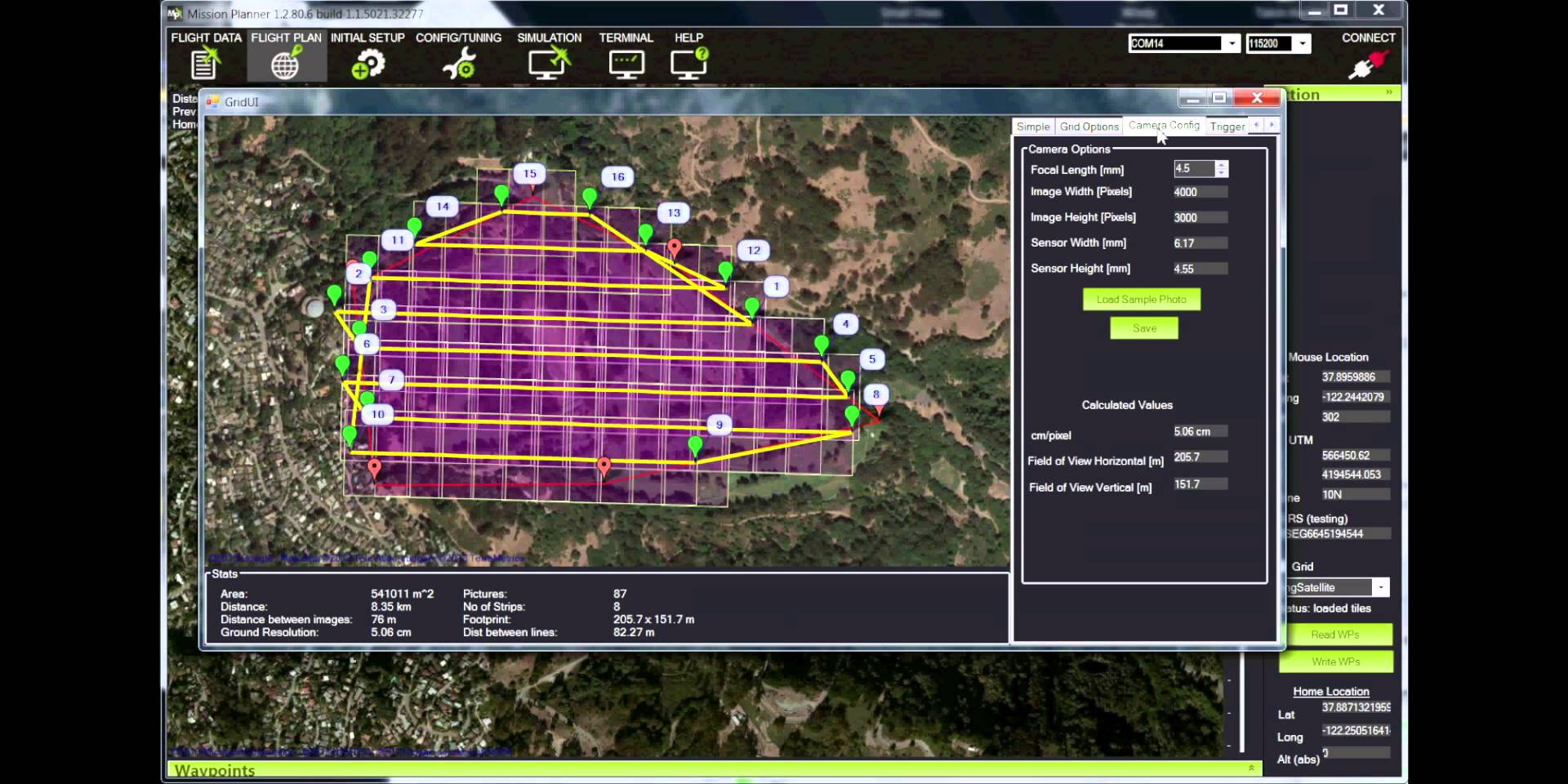
Example Mission Planner Grid
Mission Planner: Few software developers have pursued a complex suite of UAV applications as well as the open-source UAV community. A well-known platform, Mission Planner, can be used to control a variety of remote controlled autonomous vehicles including copters, planes, rovers, and to some extent even submersible vehicles. Recently, the community developing the software added in features to make UAV aerial photography and mapping even easier such as creating gridded flight plans that ensure a certain percentage of image overlap. SEACOR’s UAV flights will require 80% or higher image overlap; flying manually and achieving this is next to impossible. But Mission Planner and its compatibility with most common UAV flight controllers allow us to design an automated flight path to ensure we get the data we need from our on-board camera sensor.
Next week: UAVs, UAVs, and UAVs!
It sounds like the Clamboree was a huge success! I’m sure those touch tanks were a huge hit.